�ھ��ͷ�
�ھ��ͷ�
 ��I(y��)��
��I(y��)��


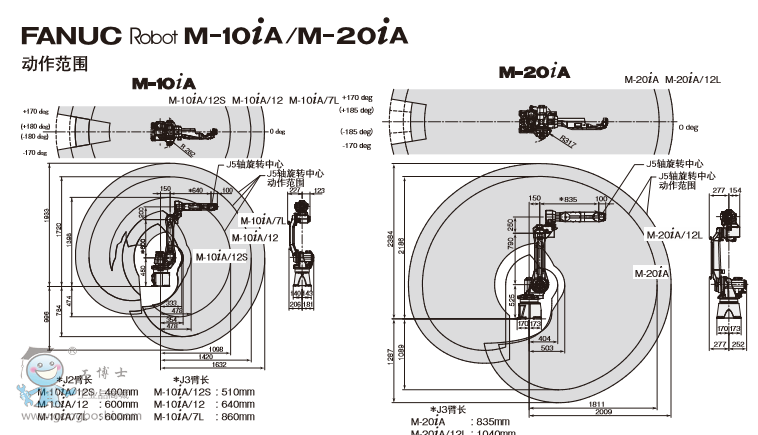
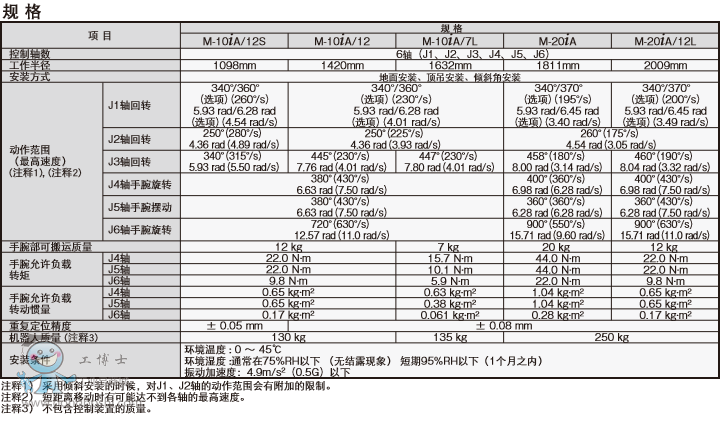
FANUC Robot M-10iA����|����ʽС�Ͱ��\�C������
1.���Ը�����ͬ����; �������C�����M���x����
M-10iA:�˜��͡��̱��ͣ�12S�����L���ͣ�7L��
M-20iA:�˜������L���ͣ�12L��
2.ͨ�^���ø߄��Ե��ֱۺ������M���ŷ����g������˼Ӝp���������s���˰��\�r�g���Ķ����F�˸����a����
3.�����S�����˪��ص��әC�����Ķ����F����l����|����ʽ������
4.�C��������������|���H���b�d�ھS�o�������õĆȑұ�����߀�����x����|�侀����ܛ���ܣ��x헣���
5.��錍�F�˙C��������������|λ�õķ�(w��n)���������Կ���ʹ��ROBOGUIDE���x헣��M��Ó�Cʾ�̣��Ķ���������pʾ�̕r�g��
6.ͨ�^��iRVision(����ҕ�X���ܣ������X�������M������ʹ�ã�����ʹ�ø��N���µ����ܻ�������