
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信


1.高速度點焊
川崎機器人通過手臂的輕量化處理、對高輸出轉(zhuǎn)矩/高回轉(zhuǎn)速度馬達的采用、對最新防震控制技術(shù)的采用,實現(xiàn)了點焊作業(yè)中占據(jù)主導(dǎo)的短距離動作時間的縮短。并且,由于伺服焊槍的槍體軸動作時序的進一步優(yōu)化,使得循環(huán)時間實現(xiàn)了大幅縮減。
2.內(nèi)置線纜、管路
通過上部手臂及手腕中心部位的中空設(shè)計,使得從機器人基座部分到手腕前端的線纜、管路可以內(nèi)置。因此,在離線示教和機器人設(shè)置完成后,以往的外置方式而引起的機器人之間或與周邊裝置之間發(fā)生的線纜、管路類干涉的問題就無虛考慮了,從而大大提升了離線示教及現(xiàn)場示教的作業(yè)效率。
3.設(shè)計自由度的提升
與以往機器人相比,設(shè)置面積及自身外圍尺度都有大幅縮小,并加以線纜、軟管的內(nèi)置化設(shè)計,使得機器人的高密度設(shè)置得以實現(xiàn)。
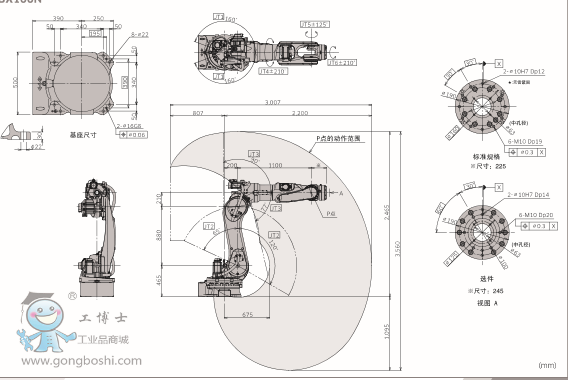
動作范圍及尺寸
動作范圍及尺寸



絡(luò)警察")


絡(luò)110")